Ovládání servo motoru již není tak jednoduché jako předchozí příklady. Proto nebudeme znovu vynalézat kolo, když to již udělal někdo před námi. Použijeme tedy knihovnu (zdrojový kód, který připojíme k našemu kódu), která se stará o samotné otáčení hřídele serva. V našem kódu budeme využívat programových struktur, které knihovna nabízí.
Místo vynalézání kola, ho tak budeme rázem používat a ušetříme si spoustu práce. Knihovna nese název Servo.h a je již obsažena v Arduino IDE.
V našem příkladu budeme pomocí For cyklu otáčet hřídelí serva od jedné krajní polohy k druhé krajní poloze a zpět.
Kód
#include <Servo.h> // připojení knihovny k programu
int pos = 0; // počáteční pozice je 0 stupňů
Servo SG90; // vytvoří instanci serva
void setup()
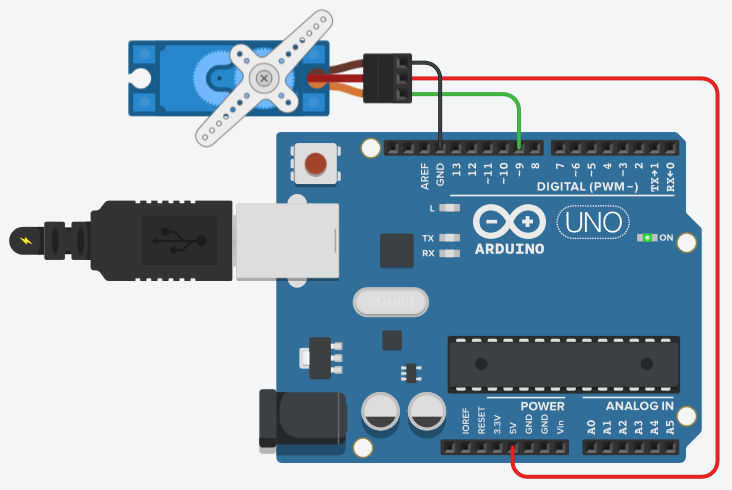
{ // řídicí pin serva je připojen na pin 9
SG90.attach(9);
}
void loop()
{ // otáčí hřídelí od 0 do 180 stupňů
// po jednostupňových krocích
for (pos = 0; pos < 180; pos += 1) {
// fce knihovny, která otočí hřídelí na pož. pozici
SG90.write(pos);
delay(15); // počká 15 ms, aby servo dosáhlo pozice
}
for (pos = 180; pos > 0; pos -= 1) {
SG90.write(pos); // otoč se na pož. pozici
delay(15); // čas na otočení serva
}
}